tracking damage in Gaza using open-access SAR data
At the threshold of detectability, both the surface of the negative and that of the thing it represents must be studied as both material objects and as media representations. In other words, this condition forces us to remember that the negative is not only an image representing reality, but that it is itself a material thing, simultaneously both representation and presence.
Weizman, Forensic architecture: violence at the threshold of detectability [1]
introduction
Obtaining comprehensive assessments of the damage in Gaza has been quite difficult, with the occupation having closed Gaza off completely to foreign journalists in the last 15 months of intensified genocide. With some Palestinians now able to return to what remains of their homes, we are starting to obtain pictures of the complete and utter destruction of entire neighborhoods — pictures reminiscent of the total annihilation caused by American atomic bombs dropped on Japan. The human cost is, of course, unspeakable [2] [3].
At the time of writing, however, most analyses still rely largely on satellite data, which is what we will look at below. High resolution visible-spectrum satellite imagery (like that used in Google Maps) is common, though typically not open access. Here we will focus on a less well-known, more technical remote sensing technique known as SAR interferometry, or InSAR, for short. Appropriately enough, InSAR is often used to track large scale environmental changes (land subsidence, volcanic uplift, deforestation and flood monitoring, etc.) in addition to structural damage. As Andreas Malm reminds us: the destruction of Palestine is the destruction of the Earth [4].
InSAR, when combined with building footprint data, can be used to create damage proxy maps like this one by Van Den Hoek and Scher:
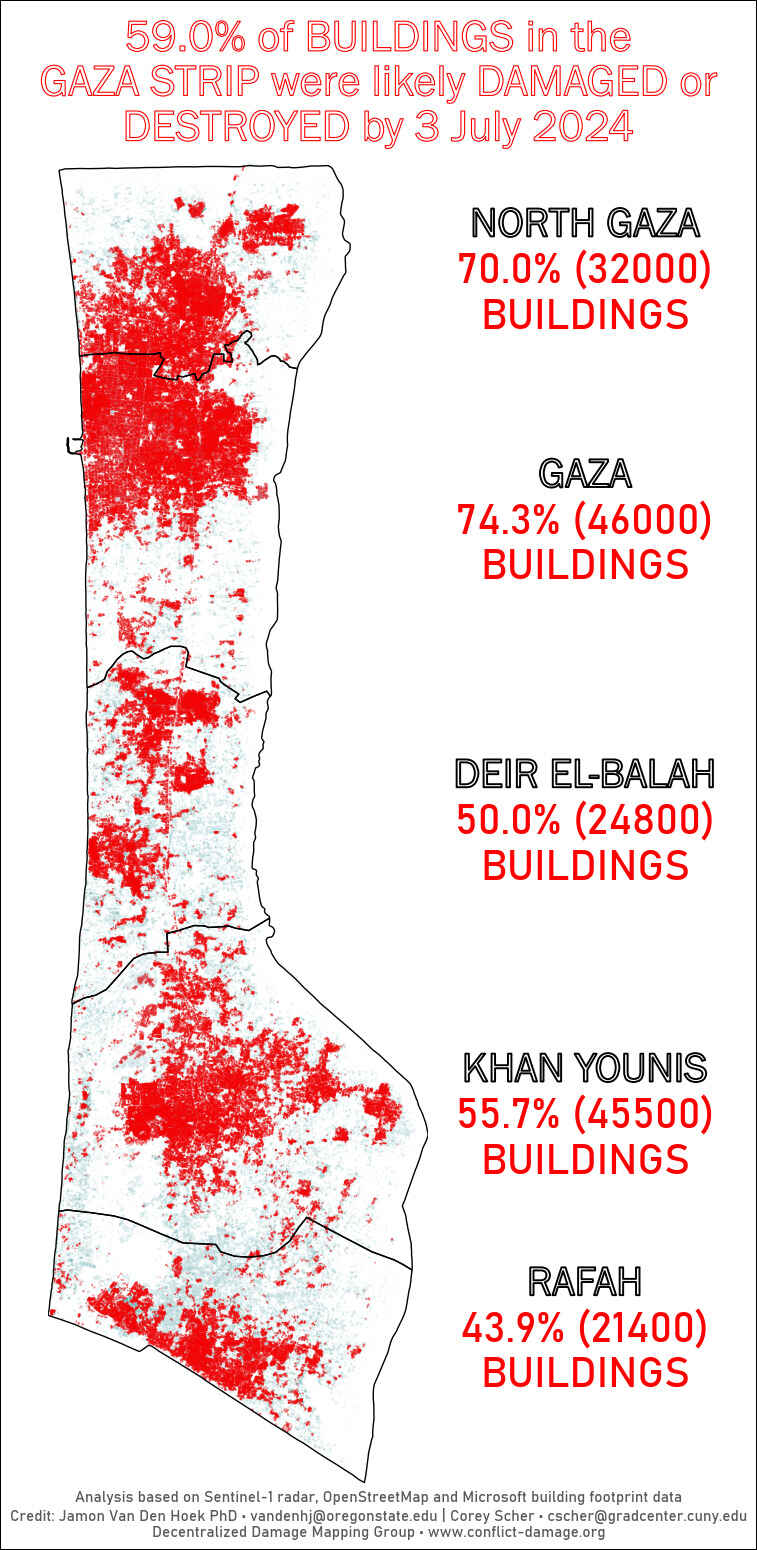
Figure 1: This damage map was constructed by the Decentralized Damage Mapping Group using Sentinel-1 radar imagery, together with various sources of building footprint data.
The methodology behind these maps is described, for
example, in the paper [5]. Maps constructed using InSAR are used in the
media and, to my surprise, surprisingly
straightforward to construct using open-access data and free-to-use InSAR
processing pipelines made available by NASA. In these notes, we’ll learn a bit
about the technique underpinning these damage estimates, known as coherent
change detection, and make our own proxy damage map of Gaza (using python).
Of course, constructing maps that are accurate is another story: this requires
a thorough knowledge of the technicalities of InSAR as well as an understanding
of how these technicalities interact with the dynamics of airstrikes targeting
dense urban centers and refugee camps.
We’ll start in the next section with a very brief introduction to SAR imaging. I’ve distilled this section from the very approachable NASA ARSET course “Basics of Synthetic Aperture Radar (SAR)” [6], the slightly more advanced SAR handbook [7], as well as chapter 1 of [8], which contains some of the mathematical details at a basic level.
A word of warning before we begin. I am not an expert: my background is in mathematical physics and data science, and this is my first foray into remote sensing. As such, corrections or suggestions are greatly appreciated.
synthetic aperture radar
Unlike visual-spectrum photography, which passively collects incoming light, synthetic aperture radar (SAR) is an active remote sensing technique. Satellites equipped with SAR transmit short bursts of microwave-frequency electromagnetic radiation (radar) focused by an antenna into a beam. The beam hits the surface of the earth and reflects off, backscatters, in various ways, as the image below shows.
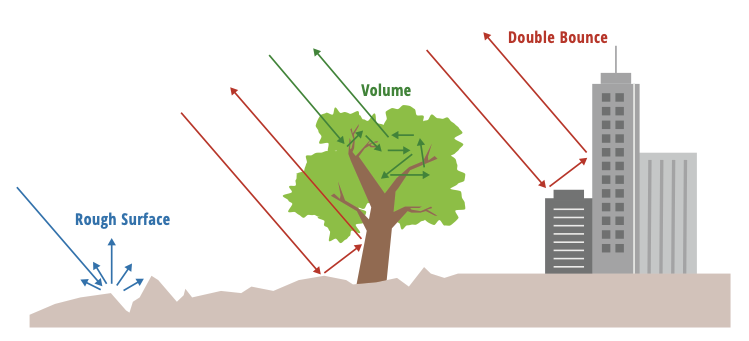
Figure 2: Radar backscatter is sensitively dependent on a number of different variables, but for urban landscapes, these patterns are good to keep in mind.
The precise way in which the radar scatters is highly dependent on a large number of variables: the incidence angle of the beam, the difference between the radar wavelength and the size of the objects being imaged, moisture content of the soil, etc. Intuitively the satellite can only detect backscatter that bounces back towards itself. A surface that is very smooth relative to the radar wavelength, for example, will appear very dark in the resulting image because the beam will bounce almost entirely away from the satellite. An area with smooth surfaces perpendicular to the smooth ground (e.g. buildings in an urban environment) on the other hand are often very bright due to the phenomenon of “double bounce” pictured above.
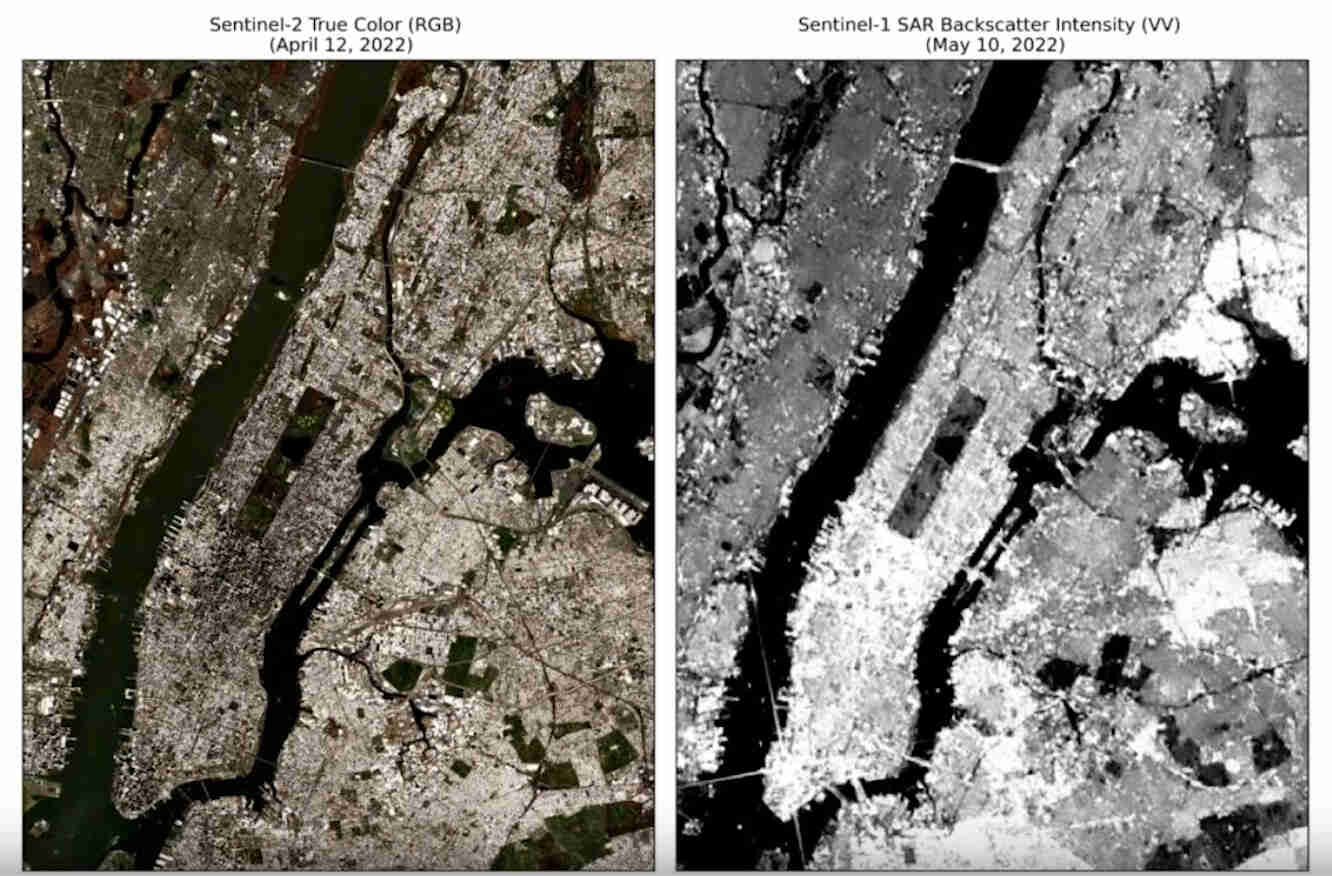
Figure 3: Even though the SAR image is not capturing visible light, the result is still recognizable due to the consistent backscatter patterns.
Clearly, then, SAR imaging produces results quite different than usual photography and requires some expertise to interpret. Radar does have its benefits though. For one thing, it’s useful even at night. Moreover, weather is no obstacle, which is quite significant given that about 55% of land tends to be covered by clouds depending on the season [9]. And in fact the way radar interacts with different materials, water, and vegetation means that it can exploited to capture information that would otherwise be obscured in photographs. This explains its utility in many ecological applications.
So much for the R in SAR, but what does the descriptor “synthetic aperture” mean? Actually, before we tackle this question, let’s take a look at the geometry of SAR imaging:
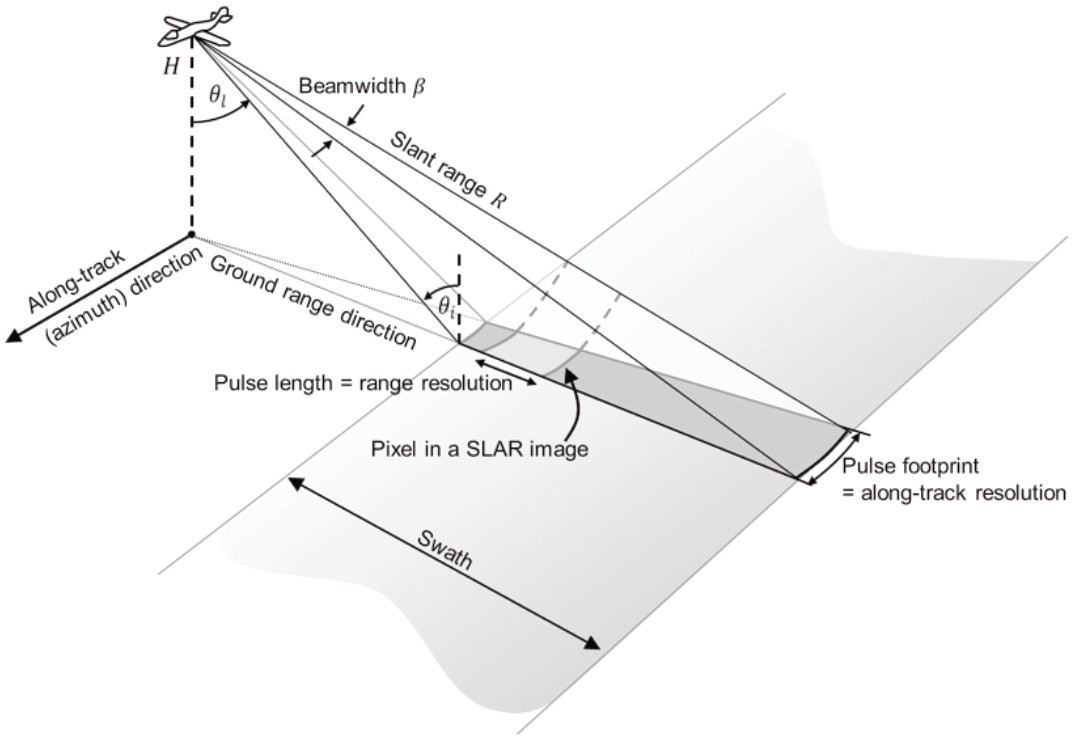
Figure 4: Taken from Chapter 2 of the SAR handbook.
There’s a lot going on here, but I just want to focus on a few points. The first is the acronym SLAR, Side-Looking Airborne Radar, which is pretty self-explanatory: the radar beam is sent out of the aircraft or satellite perpendicular to the direction of travel (the ground range direction is perpendicular to the along-track direction). Side-looking is necessary for imaging because radar measures distance to a target based on the time of arrival. As the image below demonstrates,
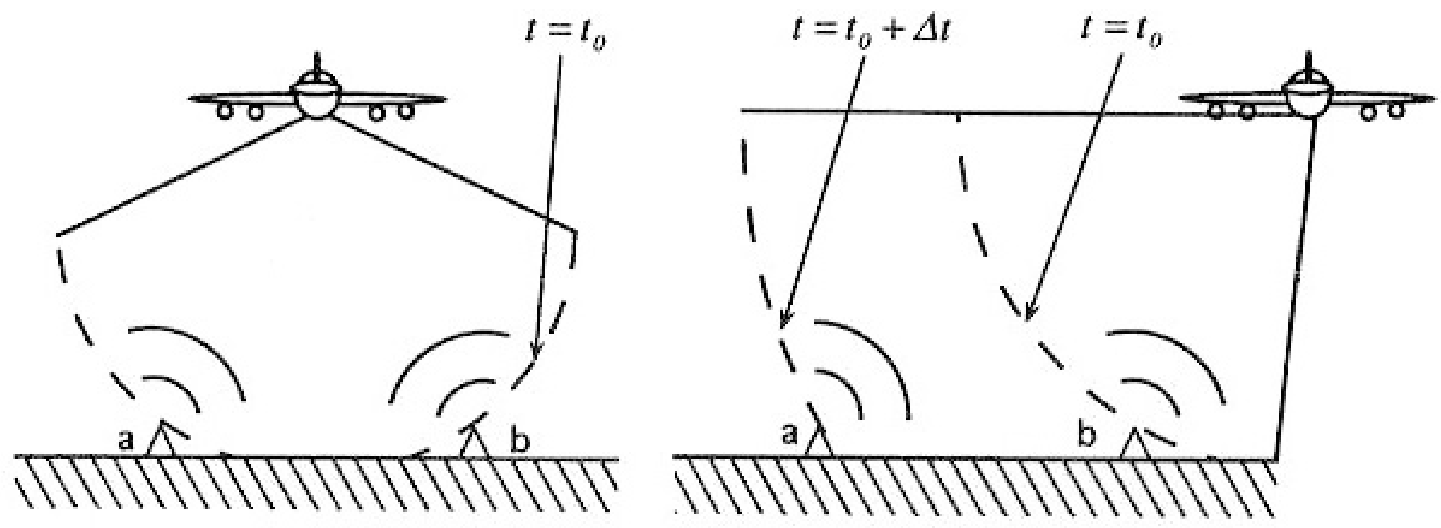
Figure 5: From a NASA ARSET training
down-looking radar would not be able to distinguish between the equidistant points a and b because the backscattered radar would reach the antenna simultaneously.1
Another thing to notice is that the geometry of SAR imaging has its own idiosyncracies. Similar to how we lose some depth perception when taking a photo from directly from above, side-looking can introduce its own geometric distortions:
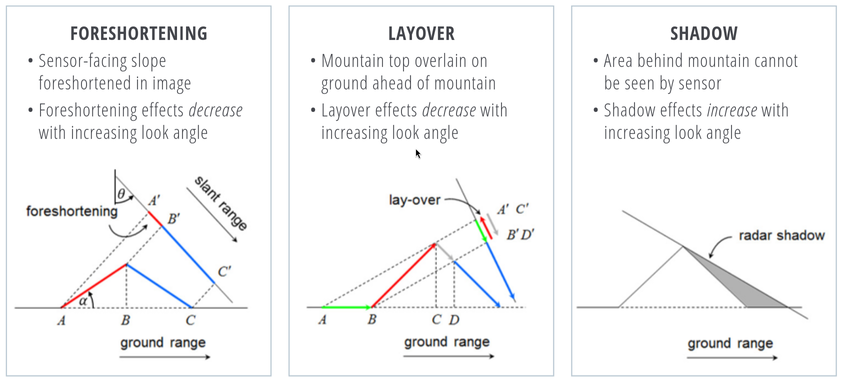
Figure 6: Taken from Chapter 2 of the SAR handbook.
The first two distortions depicted above are typically corrected for (sometimes multiple vantage points of the same can help determine the necessary topographical considerations) while the last is often just treated as missing data (or imputed via interpolation). In addition to geometric distortion, SAR images are characterized by a “salt-and-pepper” noise grain called speckle, which can be seen in the image of New York City, above. Speckle is an unavoidable part of SAR imaging, arising from the chaotic backscatter due to subpixel details (say, individual blades of grass). Speckle can be smoothed out, but smoothing comes at the cost of resolution loss.2
Interestingly, unlike in standard photography, the imaging resolution in the ground range direction increases with distance from the aircraft (see equation 2.3 of [7]). We’re not so lucky in the along-track direction, however, in which the resolution falls linearly as the altitude of the aircraft increases. This would seem to make satellite-based SAR imaging impractical, especially since the resolution scales with antenna length, which must be kept small for a feasible space mission. The solution comes in the form of the aperture synthesis principle which imitates a much longer antenna by taking a sequence of images in succession as the spacecraft moves in the along-track direction and applying some clever mathematical postprocessing.3 Remarkably, using aperture synthesis yields an along-track resolution that is independent of the aircraft altitude (see equation 1.5-7 of [8])!4
sentinel-1
The satellite whose data that we will be working with here is the Sentinel-1 [10],
Sentinel-1 works in a pre-programmed operation mode to avoid conflicts and to produce a consistent long-term data archive built for applications based on long time series.
Sentinel-1 is the first of the five missions that ESA developed for the Copernicus initiative. Its measurement domain covers landscape topography, multi-purpose imagery (land), multi-purpose imagery (ocean), ocean surface winds, ocean topography/currents, ocean wave height and spectrum, sea ice cover, edge and thickness, snow cover, edge and depth, soil moisture and vegetation.
The Sentinel-1 mission actually consisted of two satellites, Sentinel-1A and Sentinel-1B, but the latter ceased to function correctly in December of 2021. Sentinel-1C was just recently launched in December of 2024, and there is also a Sentinel-1D in the works. Sentinel-1’s orbit is cyclic, as seen in the image below, with a repeat period of 12 days (it would have been 6 were Sentinel-1B still functioning). This means that the satellite returns to approximately the exact same spot (relative to the Earth) every 12 days.5 Returning close to the same point repeatedly is crucial to be able to do SAR interferometry, as we’ll see below.
The Sentinel-1 satellite uses a C-band radar, which corresponds to a wavelength of about 5.55cm. The SAR images taken over land, according to documentation, are typically made available for access “in practice… a few hours from sensing”. This band is versatile in that its radar imagery can be used for “land subsidence and structural damage”, “geohazard, mining, geology and city planning through subsidence risk assessment”, “tracking oil spills”, “maritime monitoring”, “agriculture, forestry, and land cover classification”. There seems to be a particular emphasis (both in the documentation and in the literature) on natural disaster analysis and monitoring. It’s maybe not surprising, then, that SAR images are being used more and more to create damage proxy maps for man-made disasters such as war. Mapping damage in a given area requires an imaging of the region both before and during/after the event under study. The damage is then computed as a difference (an interference of radar waves) of the two images. To make this precise, we now turn to SAR interferometry and coherent change detection.
coherent change detection
Radar consists of carefully controlled short bursts of electromagnetic radiation, which we can visualize as waves travelling towards the target, backscattering off in all sorts of directions, with a portion of the waves returning picked up by the satellite antenna.6 The strength of the returning waves will, of course, be weaker than the strength of the emitted waves. This signal strength is known as the amplitude of the detected signal, which is typically displayed in SAR images as the brightness of a given pixel. The notion of amplitude is easy to conceptualize as signal strength, but there is another important aspect of waves known as phase, which is mathematically and conceptually more sophisticated. The phase data gathered by a SAR antenna will be the key piece below in detecting damage done to the built environment in Gaza, so it’s worth understanding the basic underlying ideas.
Consider a sinusoid (in 1-dimension for simplicity) together with its shift by \(\theta\):

Figure 7: From Wikipedia
This offset between the waves is known as a phase shift. We can imagine the red wave as outbound from the satellite, with the positive x-axis pointed towards the earth, and the blue wave the incoming backscatter. Realistically we would expect the blue sinusoid’s amplitude (vertical extent) to be much smaller than the red’s, depending on what the backscatter looked like.7 The swath of ground under investigation is split up – in the eyes of the satellite’s receiver – into resolution cells, which we can think of as pixels in the resulting image. From each resolution cell the sensor reads the amplitude of the backscattered wave and the phase difference between the outgoing wave and the backscattered wave. The most convenient way to represent this data is using complex notation for the sinusoidal signals, \(Ae^{i\theta}\), where \(A\) is the amplitude and \(\theta\) the phase. To quote the ESA’s guidelines:
Each pixel gives a complex number that carries amplitude and phase information about the microwave field backscattered by all the scatterers (rocks, vegetation, buildings etc.) within the corresponding resolution cell projected on the ground.
To understand the role of the phase difference more concretely, consider the following example, from the Sentinel-1 InSAR product guide
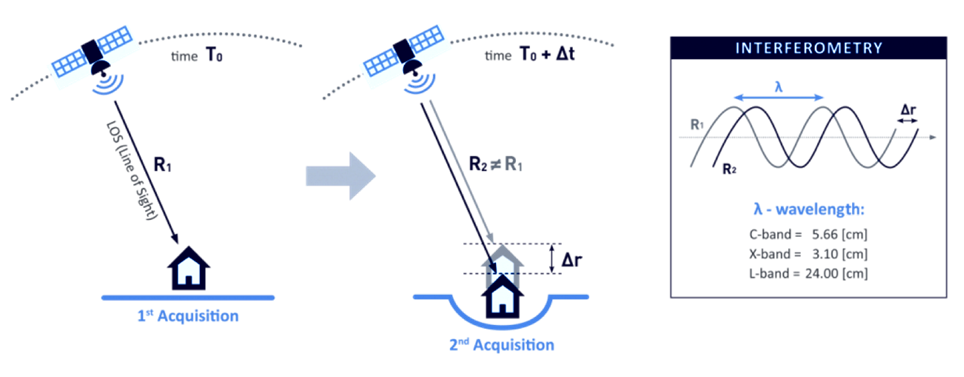
Figure 8: From the InSAR product guide
Here, on the satellite’s second pass, the scatterer under study has subsided into the ground (due to an earthquake, say) and the distance the radar waves travel changes slightly, \(R_2\neq R_1\). The resulting backscatter measured by the sensor will be slightly different in the two cases: the number of total oscillations experienced by the radar will be different: \(2R_2/\lambda\) instead of \(2R_1/\lambda\), for \(\lambda\) the radar wavelength (the factor of 2 comes from the round-trip transit). The corresponding phases will therefore be different: \(2R_2/\lambda\mod 2\pi\) versus \(2R_1/\lambda\mod 2\pi\). Comparing these repeat-pass SAR images therefore allows us to detect changes in the scatterers, both via changes in amplitude and phase.8 SAR interferometry refers to this general technique of comparing (interfering) two or more SAR images taken of the same swath, from the same vantage point, in order to extract information.
It follows that the complex number (again: amplitude and phase) associated to a given pixel of an InSAR (interferometric SAR) image is sensitively dependent on the details of the objects in that resolution cell. If we were to take two images of the exact same swath – with the satellite in the exact same position relative to the swath – at slightly different times, we might find significant differences due to slight movements in trees and grass due to wind. This is an example of what we would call an area with low coherence.9 On the other hand, high coherence areas are likely to be buildings or roads, say, at least in an urban environments. To detect building damage, then, we need 3 SAR images: 2 from before the event to isolate areas of high coherence, and 1 from after the event to find areas whose coherence has dropped significantly.
In more detail:
Choose a time \(t_0\) such that \(t_0\) and \(t_0+\delta\) are before the event of interest (IOF bombardment of Gaza). Here \(\delta\) is the repeat-pass look time, 12 days in the case of Sentinel-1.
Use the images taken at \(t_0\) and \(t_0+\delta\) to generate a coherence image, call it \(\gamma_1\). Isolate the regions of high coherence. These regions – at least in urban settings – are likely to represent the built environment, and are what we’re interesting in when attempting to determine building damage.
Use the images taken at \(t_0+\delta\) and \(t_0+2\delta\) to generate another coherence image, call it \(\gamma_2\). This time interval spans the event under investigation.
Denote by \(R\) the the high-coherence region in the first coherence image \(\gamma_1\). Compute the percent change in coherence, restricted to \(R\):
\begin{equation*} \Delta=\left.(\gamma_2-\gamma_1)/\gamma_1\right|_{R} \end{equation*}
We expect decreases in coherence in the previously high-coherence zones to correspond, proportionally, to building damage (see the methods sections of [5]).
Let’s take a look at how this works in practice by working with freely-available, preprocessed data from the Sentinel-1 satellite (via NASA’s Earth Data portal).
downloading InSAR data
The main tool we’re going be using to pin down the relevant Sentinel-1 images of the Gaza strip is the Alaska Satellite Facility’s data search tool called Vertex. Before we can use Vertex, we need to register for an account on NASA’s Earth Data, which can be done here. After completing the registration, open up Vertex and hit the “Sign In” button at the top right. There is an EULA to agree to, but after that we’re good to go.
Vertex is a web-based UI10 that we can use to search the Sentinel-1 dataset geographically and temporally. Our focus in this note is on Gaza, with the event under investigation being the Zionist bombardment immediately after October 7th, 2023. We can use Vertex to draw a rectangle around the Gaza strip to restrict our attention to. I free-handed a rectangle around Gaza on Vertex, specified in the well-known text (WKT) format by
1wkt_gaza = (
2 "POLYGON(("
3 "34.2173 31.2165,"
4 "34.595 31.2165,"
5 "34.595 31.5962,"
6 "34.2173 31.5962,"
7 "34.2173 31.2165"
8 "))"
9)
We’ll need this later when we’re analyzing the data in Python.
As outlined above, coherent change detection requires 3 SAR images taken from
the same vantage point11: 2 before the event to isolate the high-coherence
pre-event built environment, and 1 after to measure the extent of change
post-event. Click on the Filters button and change the start and end date to
September 1, 2023 and December 1, 2023. Then, restrict the file type to L1 Single Look Complex (SLC), as that’s the type of SAR image we’re going to use.
Hitting the search button should now yield a number of rectangles overlaid the
map, each of which intersects non-trivially with our polygon containing Gaza.
The list of scene files on the bottom left corresponds to these rectangles. We
mentioned earlier that Sentinel-1 takes snapshots of the same swath every 12
days – we can see this by noting that the scene ...DF80 taken on October 5,
2023 covers more or less the exact area as the scene ...D1ED taken on
September 23, 2023 does. From the scene detail window we can see that both of
these scenes are frame 97 of path/track number 160. This is precisely the sort
of pair of images that we need when doing repeat-pass interferometry.
We’ll take ...DF80 as the second of the 2 pre-event images. To find
appropriate images for the remaining 2 images, we can click on the Baseline
button that appears at the bottom of ...DF80’s Scene Detail window. This
modifies our search to a baseline-type search, which displays a number of other
images as points on a scatterplot. This plot is showing us that these images
were taken not only at a different time than our baseline image, but also at a
different position (“perpendicular baseline”).
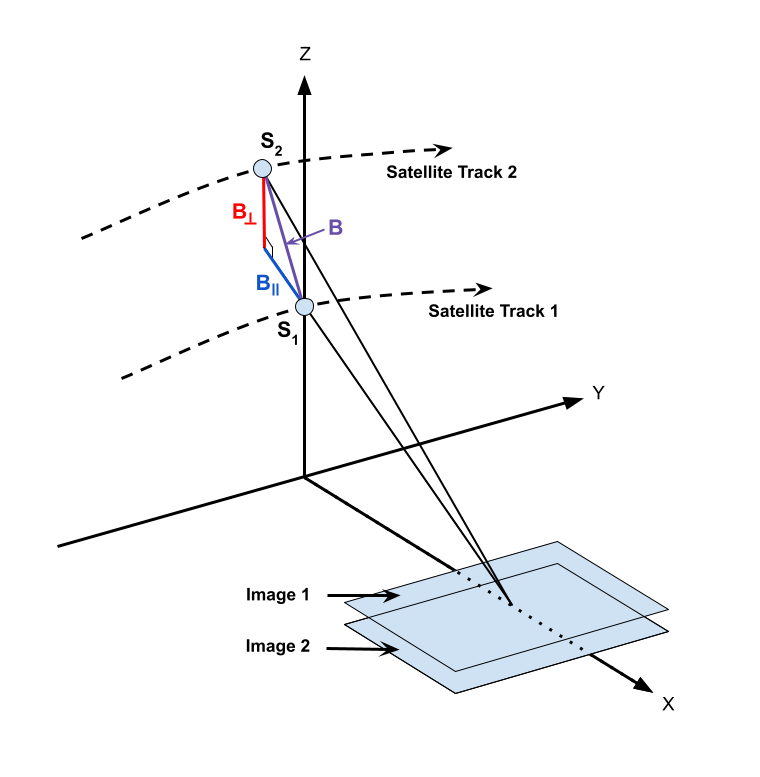
Figure 9: From the InSAR product guide
Ideally the images would be taken at a
perpendicular baseline of 0, but we can see ...62AB (September 11, 2023) and
...D1ED (September 23, 2023) before our October 5th image at perpendicular
baselines of -67 m and -157 m, respectively, and ...6EBF (October 17, 2023) at
a tiny perpendicular baseline of 6 m. We’ll take ...6EBF as our post-event
image, but we have two options for our first pre-event image. Now I’m not an
InSAR expert, so I’m not sure how much worse a -157 m baseline is (for purposes
of coherent change detection) than a -67 m baseline. We may as well run the
analysis with both and see if there’s any significant differences.
We can now use Vertex to request ASF to generate the SAR interferometry data
from the pairs of SAR images that we’ve chosen. Making sure that the list of
scenes is showing 0m and 0d for ...DF80, click on the on-demand button (shown
as three overlapping rectangles to the right of the Days column) and select
InSAR Gamma followed by Add 1 SLC job for each of our other images
...62AB, ...D1ED, and ...6EBF. This will add three jobs to our on-demand
queue. Open up the queue details at the top-right of the interface and you
should see a set of processing options, with the 3 jobs listed in the queue
below. Set the LOOKS option to 10X2 (this produces a higher resolution image
than the 20X4 option) and check the Water Mask box to make sure we don’t
bother processing the water off the coast. We’ll leave the rest of the options
as default for now, and submit the jobs. Note that you’ll be given an option to
label the batch with a project name to make for easier retrieval later.
The jobs will take some time to process, and you can view their status by
selecting the On Demand search type and filtering by the project name. The
jobs will show as pending, but once they’re done you can add each of them to
your cart and download them. These three datasets, once unzipped, are a little
over 1GB in total.
raster processing
In the following section, I mostly follow Corey Scher’s code for the relevant NASA ARSET training, which can be found here.
Now that we have our coherence data on disk, we can apply some do some simple computations to generate coherence change plots. First let’s get paths to our data sorted out and load the images into memory.
1from pathlib import Path
2import re
3
4import geopandas as gpd
5import matplotlib.pyplot as plt
6import numpy as np
7import pandas as pd
8import rioxarray
9import shapely
10import shapely.wkt
11import xarray as xr
12
13DATA_PATH = Path.home() / "data/insar/"
14data = []
15pattern = re.compile(r"(2023\d{4})T.*(2023\d{4})T")
16for dir in DATA_PATH.iterdir():
17 for p in dir.glob("*corr.tif"):
18 matches = pattern.search(p.name)
19 if matches is None:
20 continue
21 gps = matches.groups()
22 data.append({"start_date": min(gps), "end_date": max(gps), "path": p})
23data = pd.DataFrame(data).sort_values(by="start_date").reset_index(drop=True)
24data["start_date"] = pd.to_datetime(data.start_date).dt.date
25data["end_date"] = pd.to_datetime(data.end_date).dt.date
26data["image"] = data["path"].map(lambda p: xr.open_dataset(p, engine="rasterio"))
We’ve singled out the files ending in ...corr.tif, as these are the
correlation/coherence raster images (that is, data arranged as a matrix of
cells, in this case pixels). We use the xarray library and friends to work
with rasters. Next, recall that the processed SAR images we downloaded were
significantly larger than our actual area of interest, which is the Gaza Strip.
To cut away the rest, we’ll grab a shapefile for the Gaza strip (I found one
here, but you can probably look for more official sources.) Actually, the
shapefile I have is for Palestine more generally, and thus includes the West
Bank. To restrict to the Gaza strip we can just intersect with the polygon we
drew in Vertex.
1vtx_rect = shapely.wkt.loads(wkt_gaza)
2with open(
3 DATA_PATH / "palestine-boundaries-data/geoBoundaries-PSE-ADM0_simplified.geojson"
4) as f:
5 gaza_geom = shapely.from_geojson(f.read()).intersection(vtx_rect)
6gaza_strip = gpd.GeoSeries(gaza_geom, crs="EPSG:4326").to_crs(data.image[0].rio.crs)
7
8# clip each of our rasters to restrict to Gaza
9data["image"] = data.image.map(lambda r: r.rio.clip(gaza_strip))
10
11fig, axs = plt.subplots(1, 2, figsize=(8, 4), sharey=True)
12for i in range(2):
13 im = data.image[i].band_data.plot(ax=axs[i], cmap="Greys_r", vmin=0, vmax=1)
14 if i == 0:
15 im.colorbar.remove()
16 axs[i].set_title(f"{data.start_date[i]} to {data.end_date[i]}")
17 axs[i].get_xaxis().set_visible(False)
18 axs[i].get_yaxis().set_visible(False)
19plt.suptitle("Coherence: Gaza strip")
20im.colorbar.set_label("Coherence")
21plt.tight_layout()
22plt.savefig("../../static/images/insar-gaza/coherence-gaza.png", dpi=300)

With these numbers in mind, we expect any analysis done with the first image will effectively be assuming a smaller built environment than an analysis using the second image. We could investigate here more thoroughly to choose which is a better pre-event image to use, but for the purposes of this note, I’ll just stick with using the image on the right. My guess is that having a 12-day smaller time interval is more important than having a 100m smaller perpendicular baseline.
With all that being said, let’s get to the comparison against coherence post-event. We’ll compute the percent change in coherence post-event relative to pre-event coherence for both images. The important point to remember is that we’re only interested in areas of high coherence pre-event. We also exclude areas whose coherence increased: we’re operating under the assumption that damage decreases coherence.
1# compute percentage change in coherence
2aligned = xr.align(data.image[1], data.image[2])
3pre = aligned[0]
4post = aligned[1]
5change = (post - pre) / pre
6# in areas of high-coherence, where it decreased
7change = change.where((pre >= 0.9) & (change <= 0))
8
9fig, ax = plt.subplots(1, 1, figsize=(8, 6), sharey=True)
10im = change.band_data.plot(ax=ax, vmin=-0.15, vmax=0, levels=5, cmap="Reds_r")
11ax.get_xaxis().set_visible(False)
12ax.get_yaxis().set_visible(False)
13ax.set_title("Change in coherence: Gaza strip\nOctober 17, 2023")
14im.colorbar.set_label("Coherence change (%)")
15plt.tight_layout()
16plt.savefig("../../static/images/insar-gaza/gaza-coherence-change.png", dpi=300)
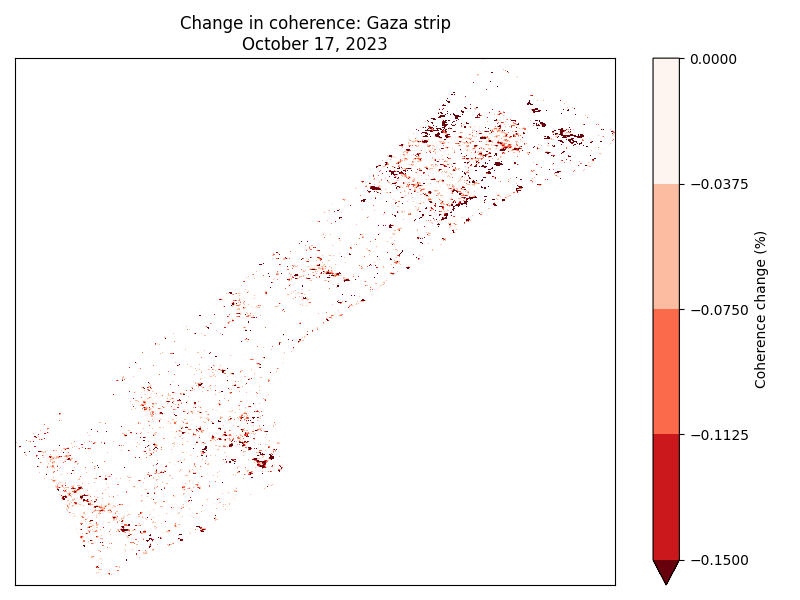
The darker areas here correspond to high-coherence areas that, between October
5th and October 17th experienced a significant decrease in coherence. That is,
they correspond to the areas that likely suffered significant damage under
Zionist bombardment. We could now cross-reference these hotspots with images
from local reporters on the ground and any visible-spectrum satellite imagery
that we might have access to. If we’re interested in smaller structures,
however, InSAR data may not be able to tell us much: at 10X2 looks, each pixel
in the image above corresponds to a 40m square, and the resolution at which
close scatterers can be distinguish is 80m (see here for more details). InSAR
techniques are therefore useful as one tool in a larger investigative arsenal.
The paper [5], for instance, combines InSAR images with data from the UN
and other sources to strongly correlate high-damage areas with “health,
educational, and water infrastructure in addition to designated evacuation
corridors and civilian protection zones”.
closing thoughts
Obviously computing spatial correlations using open-access satellite imagery will not miraculously animate the farcical corpse that is international humanitarian law. So why do this exercise? Well I hope this note at least serves as a small reminder that science and technology can be applied – in however small and minor ways – in the service of humanity instead of against it. As mainstream science continues to unabashedly devote itself to mass surveillance, killer drones, and the destruction of the earth [11], it can be difficult to conceptualize the technical as liberatory.
For those of us scientists or technical workers in the imperial core, we must devote ourselves to understanding the technologies that our fields use to sustain and exacerbate modern conditions of oppression, and wherever possible, co-opt the master’s tools.
If you found this note interesting or learned something useful, please consider donating to The Sameer Project to aid affected Palestinians in Gaza. They’re doing crucial on-the-ground, diaspora-based aid work in Gaza.
appendix
With the battle in Gaza lost, the Zionist eye now turns back in earnest towards the occupied West Bank. Let us take a look at Sentinel-1’s images of the Jenin, which has recently become the site of heavy Zionist destruction. We’ll take the dates of January 10th, 2025 to January 22nd, 2025 for our baseline, and February 3rd, 2025 as our post-event date (I’ll be using path 87, frame 104 in what follows). We can largely repeat what we did above, so I won’t go into the details again.
First we load the downloaded processed images.
1# a rough rectangle made in Vertex around Jenin
2wkt_jenin = (
3 "POLYGON(("
4 "35.272 32.4462,"
5 "35.3201 32.4462,"
6 "35.3201 32.4741,"
7 "35.272 32.4741,"
8 "35.272 32.4462"
9 "))"
10)
11# load in the images
12data = []
13pattern = re.compile(r"(2025\d{4})T.*(2025\d{4})T")
14for dir in DATA_PATH.iterdir():
15 for p in dir.glob("*corr.tif"):
16 matches = pattern.search(p.name)
17 if matches is None:
18 continue
19 gps = matches.groups()
20 data.append({"start_date": min(gps), "end_date": max(gps), "path": p})
21data = pd.DataFrame(data).sort_values(by="start_date").reset_index(drop=True)
22data["start_date"] = pd.to_datetime(data.start_date).dt.date
23data["end_date"] = pd.to_datetime(data.end_date).dt.date
24data["image"] = data["path"].map(lambda p: xr.open_dataset(p, engine="rasterio"))
Next we restrict to Jenin, and make sure we’re seeing an image that is consistent with a dense urban environment.
1vtx_rect = shapely.wkt.loads(wkt_jenin)
2with open(
3 DATA_PATH / "palestine-boundaries-data/geoBoundaries-PSE-ADM0_simplified.geojson"
4) as f:
5 wb_geom = shapely.from_geojson(f.read()).intersection(vtx_rect)
6west_bank = gpd.GeoSeries(wb_geom, crs="EPSG:4326").to_crs(data.image[0].rio.crs)
7
8# clip each of our rasters to restrict to Gaza
9data["image"] = data.image.map(lambda r: r.rio.clip(west_bank))
10
11fig, axs = plt.subplots(1, 2, figsize=(8, 4), sharey=True)
12for i in range(2):
13 im = data.image[i].band_data.plot(ax=axs[i], cmap="Greys_r", vmin=0, vmax=1)
14 if i == 0:
15 im.colorbar.remove()
16 axs[i].set_title(f"{data.start_date[i]} to {data.end_date[i]}")
17 axs[i].get_xaxis().set_visible(False)
18 axs[i].get_yaxis().set_visible(False)
19plt.suptitle("Coherence: Jenin, West Bank")
20im.colorbar.set_label("Coherence")
21plt.tight_layout()
22plt.savefig("../../static/images/insar-gaza/coherence-jenin.png", dpi=300)
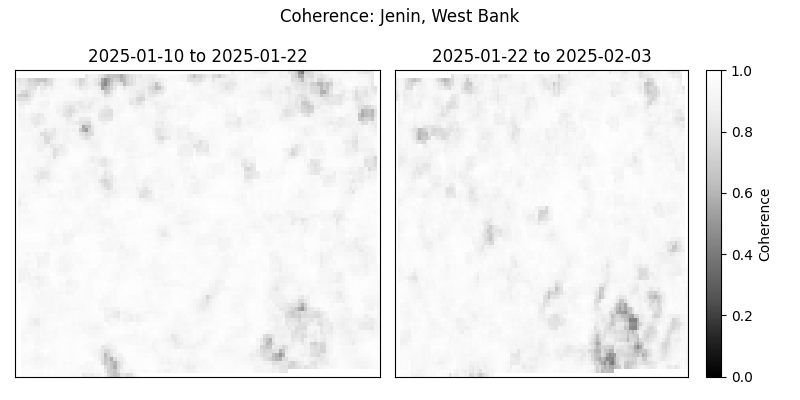
As before, we consider the percentage change in coherence of the image on the right specifically in the regions of high coherence on the left.
1aligned = xr.align(data.image[0], data.image[1])
2pre = aligned[0]
3post = aligned[1]
4change = (post - pre) / pre
5change = change.where((pre >= 0.9) & (change <= 0))
6fig, ax = plt.subplots(1, 1, figsize=(8, 6), sharey=True)
7im = change.band_data.plot(ax=ax, vmin=-0.15, vmax=0, levels=5, cmap="Reds_r")
8ax.get_xaxis().set_visible(False)
9ax.get_yaxis().set_visible(False)
10ax.set_title("Change in coherence: Jenin, West Bank\n February 3, 2025")
11im.colorbar.set_label("Coherence change (%)")
12plt.tight_layout()
13plt.savefig("../../static/images/insar-gaza/jenin-coherence-change.png", dpi=300)
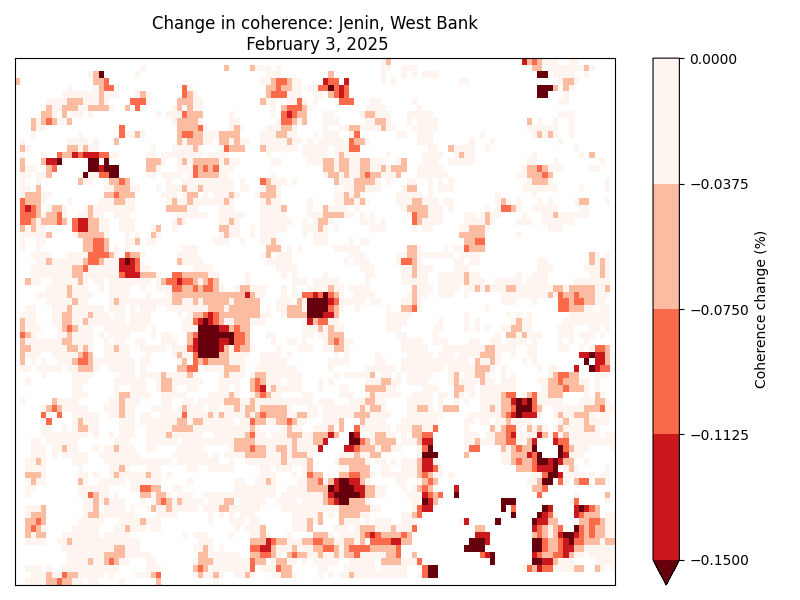
This image suggests significant and widespread damage across Jenin, which is consistent with reporting coming out of the area. At the time of writing, however, I don’t have access to any resources for the purpose of cross-referencing so I’ll leave it at that. I may look into playing around with any openly available building footprint data if I find the time, and update this note accordingly.
A careful reader might object that side-looking does not prove that no ambiguities can arise. Indeed, the resolution of ambiguities is a non-trivial problem and turns out to pose certain constraints on both hardware and signal processing. For more details, see section 1.6.1 of [8]. ↩︎
There is also noise due to unwanted microwave radiation picked up by the antenna, e.g. its own blackbody radiation. One particularly amusing one is a signal that’s some 13 billion years old: the cosmic microwave background radiation [12]. ↩︎
This trick was discovered by Carl Wiley in 1952 at an aerospace/defense subsidiary of the Goodyear tire company that changed hands multiple times and, since 1993, has been owned by Lockheed Martin. Lockheed Martin is the world’s largest weapons manufacturer and is one of the many that is profiting from the Zionist genocide in Gaza. ↩︎
Note: technically speaking, images are called SLAR images until they’ve been processed appropriately, after which they’re called SAR images. ↩︎
The orbit is polar, so the path spacing is considerably denser closer to the poles. Hence Sentinel-1 images regions closer to the poles much more often (about once a day) than regions closer to the equator (about once every three days). Nevertheless, as SAR interferometry requires two SAR images to be taken from almost exactly the same position, we are limited to a time-delta of 12 days when producing InSAR images. ↩︎
Polarization is another important aspect of SAR, but I’ve avoided discussing it here for simplicity. ↩︎
Consider the following back-of-the-envelope calculation. The surface area of a sphere (an expanding wavefront) scales as the square of the radius, so we expect the amplitude of the backscattered wave to be at most \(1/(4\ell^2)\) times the amplitude of the outgoing wave if \(\ell\) is the distance from the satellite to the scatterer on the ground. ↩︎
There is a technical difficulty in measuring phases: the phase of a wave that travelled distance \(L\) is exactly the same as the phase of a wave that travelled distance \(L+2\pi\). This is of course by the very definition of phase, but it does introduce an ambiguity in data processing. There are a number of sophisticated ways to determine the “unwrapped” phase correctly, known as phase unwrapping algorithms. ↩︎
Technically speaking, coherence is defined as a moving average of cross-correlation (\(Ae^{i\theta}B^*e^{-i\phi}\)) between the before-image \(Ae^{i\theta}\) and the after-image \(Be^{i\phi}\) (in Sentinel-1’s case, taken 12 days later), as the averaging window moves across the full image a few pixels at a time. ↩︎
The Vertex UI is a convenient way to riffle through the SAR images, picking and choosing a few to process and download. This could be done using the
asf_searchpython package instead, with the processing done via thehyp3_sdkAPI, but for our one-off purposes here, we won’t bother with that. Corey Scher, one of the authors of the paper where I first saw this InSAR technique [5], has some very useful code on his GitHub where you can find a well-documented programmatic approach applied to the case of the urban damage in Aleppo in 2016. ↩︎There is an amazing amount of engineering work that goes into getting the Sentinel-1 satellite to almost exactly the same point in orbit repeatedly. As such, there are sometimes technical issues that may affect data quality, and relevant notices can be found on the ASF news site. ↩︎